您现在的位置是:首页 > 互联网网站首页互联网
地面机器人深度估计和相对定位框架
- 编辑:
- 2021-12-13 14:27:07
- 来源:
葡萄牙波尔图大学和瑞典KTH皇家理工学院的研究人员最近开发了一个框架,可以估计正在合作完成给定任务的两个地面机器人的深度和相对姿态。他们的框架在arXiv上的一篇预先发表的论文中有所概述,该论文可以帮助提高多个机器人在涉及探索、操纵、覆盖、采样和巡逻以及搜索和救援任务的任务中的性能。
近年来,研究人员进行了越来越多的研究,以开发在分散架构中有效协调多个机器人的解决方案。为了有效地完成一组任务,一组或编队中的每个机器人至少要部分了解周围环境中其他智能体的姿态。
这种与姿态相关的数据(称为相对姿态信息)使智能体能够优化给定目标的功能,重新安排其轨迹,并避免与其他机器人发生碰撞。然而,在一些实际环境中,代理可能很难获得准确的相对姿态估计。例如,当在偏远地区或隐蔽区域执行极端任务时,机器人可能会遇到通信通道和高精度定位或运动捕捉系统的问题。
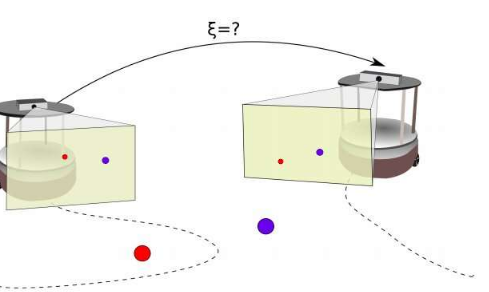
考虑到这一点,来自波尔图大学和KTH的一组研究人员着手开发一个框架,该框架可以增强为共同目标而合作的地面机器人的三维深度估计和相对姿态估计。他们特别关注了一个场景,在这个场景中,两辆自动地面车辆在未知的环境中行驶,都配备了透视摄像头。
研究者在论文中解释道:“深度估计问题旨在恢复环境的3D信息。”“相对定位问题包括通过感知彼此的姿态或共享感知环境的信息来估计两个机器人之间的相对姿态。”
大多数现有的机器人深度估计和相对定位解决方案都是通过分析不连续的数据集来工作的,而不考虑事件的时间顺序。另一方面,研究人员提出的方法考虑了两个机器人通过摄像机收集的信息,然后将它们组合起来计算它们的相对姿态。由两个智能体收集的深度估计信息和输入命令被馈送到扩展卡尔曼滤波器(EKF),该滤波器被设计成处理该数据并估计机器人之间的相对姿态。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!